Home / Experience / Publications / CV
Generalized Planning
Generative Models for Automated Planning
Collaborators: AIISC - University of South Carolina, IBM Research, University of Udine, University of Brescia
Advisors: Biplav Srivastava, Francesca Rossi, Lior Horesh, Keerthiram Murugesan
Large Language Models (LLMs) have been the subject of active research, significantly advancing the field of Natural Language Processing (NLP).
From BERT to BLOOM, LLMs have surpassed state-of-the-art results in various natural language tasks such as question-answering, summarization, and text generation.
Many ongoing efforts focus on understanding LLMs' capabilities, including their knowledge of the world, syntax, and semantics.
However, extending the textual prowess of LLMs to symbolic reasoning has been slow and predominantly focused on tackling problems related to the mathematical field.
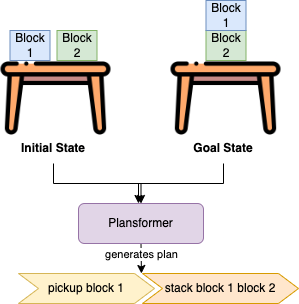
In this work, we explore the use of LLMs for automated planning - a branch of AI concerned with the realization of action sequences (plans) to achieve a goal, typically executed by intelligent agents, autonomous robots, and unmanned vehicles.
Representative Publications
- Plansformer: Generating Symbolic Plans using Transformers
[Paper] [Tool Website] [Demo] [BibTex]
Planning using Fast and Slow AI Architecture
Collaborators: IBM Research, AIISC - University of South Carolina, University of Udine, University of Brescia, Union College (New York), Tulane University, University of West Florida
Advisors: Biplav Srivastava, Francesca Rossi, Lior Horesh, Keerthiram Murugesan
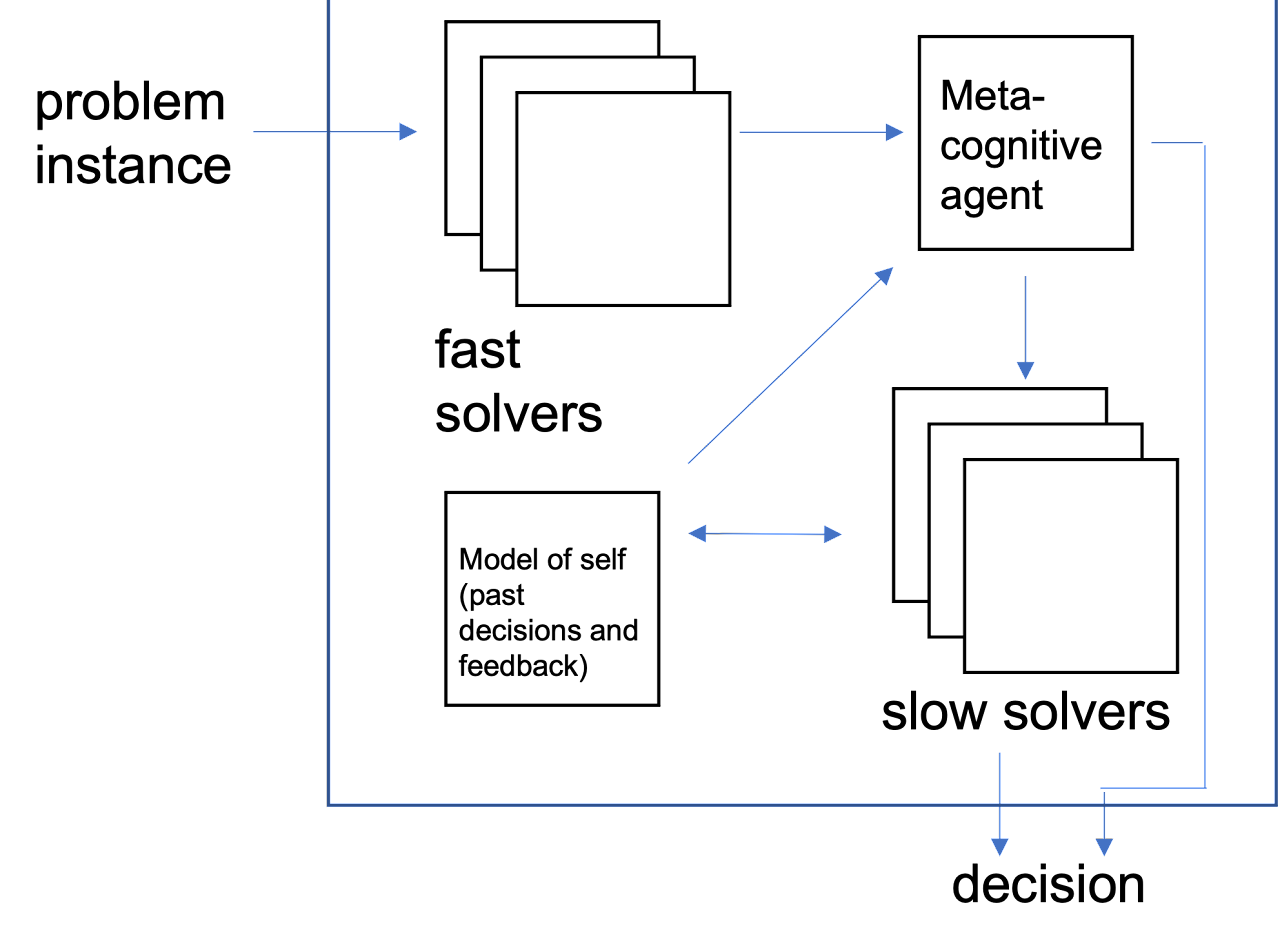
The newly introduced idea of Fast and Slow AI (SOFAI) architecture is inspired from the cognitive theories mentioned by Daniel Kahneman in Thinking Fast and Slow.
This research project aims to build AI-supported machines that can
- make decisions with emergent behaviors similar to the human ones, and
- support human decision making through nudging and explanations.
To achieve these goals, the team is designing and building a cognitive architecture to mimic these two broad modalities in a machine. We adapt the SOFAI architecture to solving planning domains where incoming problems are solved by either system 1 (or ”fast” - S1) agents, also called solvers, that react by exploiting either past experience (case-based reasoning) or using a learnt model called as Plansformer, or by system 2 (or ”slow” - S2) agents, that are deliberately activated when there is the need to reason and search for optimal solutions beyond what is expected from the system 1 agent. SOFAI architecture with Plansformer as S1 solves more problems than the symbolic planner (FastDownward, which is also used as S2). Visit the dedicated website for more details on SOFAI.
Representative Publications
Automated Planning for Dialog Agents
A generic dialog agent for information retrieval based on automated planning within a reinforcement learning platform
Collaborators: AIISC - University of South Carolina
Advisor: Biplav Srivastava
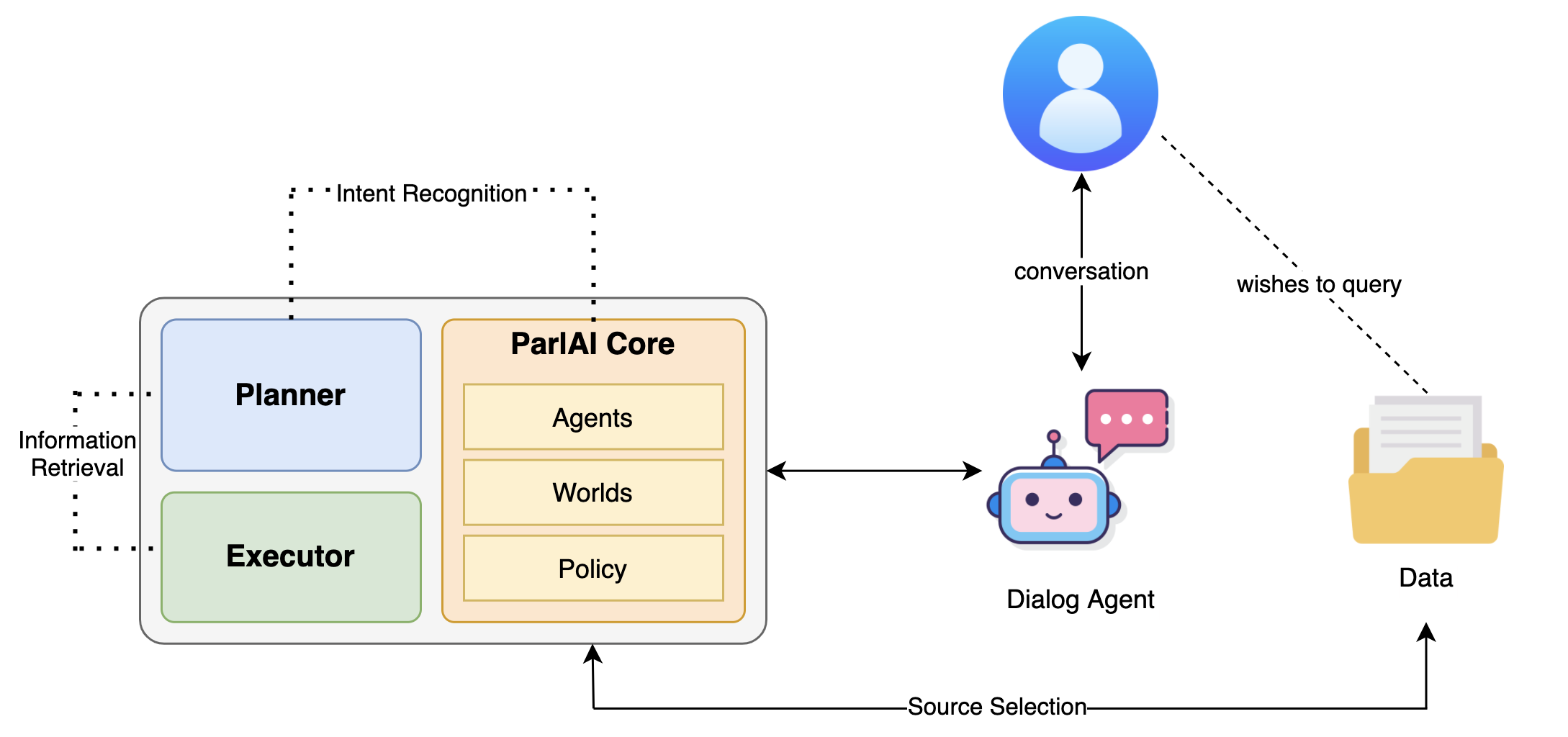
With the easy availability of large online datasets, businesses often need to allow users to search for information using natural interfaces. Dialog systems provide this interface, allowing users to type or speak to the system and ask for information. However, current learning-based methods for building a dialog agent are data-specific, require large amounts of training data, and are difficult to scale when a user's interaction spans querying multiple data sources.
In this work, we explore a novel and generic approach for dialog-based information retrieval using automated planning within a reinforcement learning (RL)-based platform, ParlAI. Our approach seamlessly scales to new data sources and explores various planning and RL integration strategies. The planner performs a search for response strategies that are goal-oriented and controlled, even across multiple turns, without prior training data. RL is used to automate data source selection during an interaction. One can use the RL for end-to-end training or select a data source and use only the planner. We demonstrate the viability of our approach using large datasets, such as UNSPSC and ICD-10, and a simple phone directory.
Representative Publications
A Rich Recipe Representation as Plan to Support Expressive Multi Modal Queries on Recipe Content and Preparation Process
Collaborators: AIISC - University of South Carolina, Oklahoma State University
Advisors: Biplav Srivastava, Sathyanarayanan Aakur
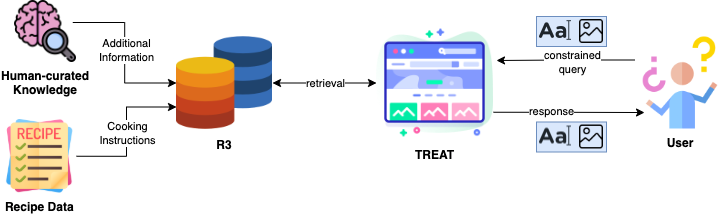
Food is essential for both health and economic prosperity. AI is being used in the cooking domain to support precision health through interfaces and chatbots. However, textual recipes make it challenging for machines to understand, requiring better representation to handle ambiguity and sparseness. The construction of a machine-understandable rich recipe representation (R3) has been proposed in this paper. R3 includes plans with additional knowledge about allergens, images of ingredients, possible failures, and tips for each atomic cooking step. TREAT is a tool for recipe retrieval that uses R3 to perform multi-modal reasoning on plan objects, food preparation process, and media type, leading to improved retrieval efficiency and new capabilities not possible with textual representation.
Representative Publications
Applications of Automated Planning
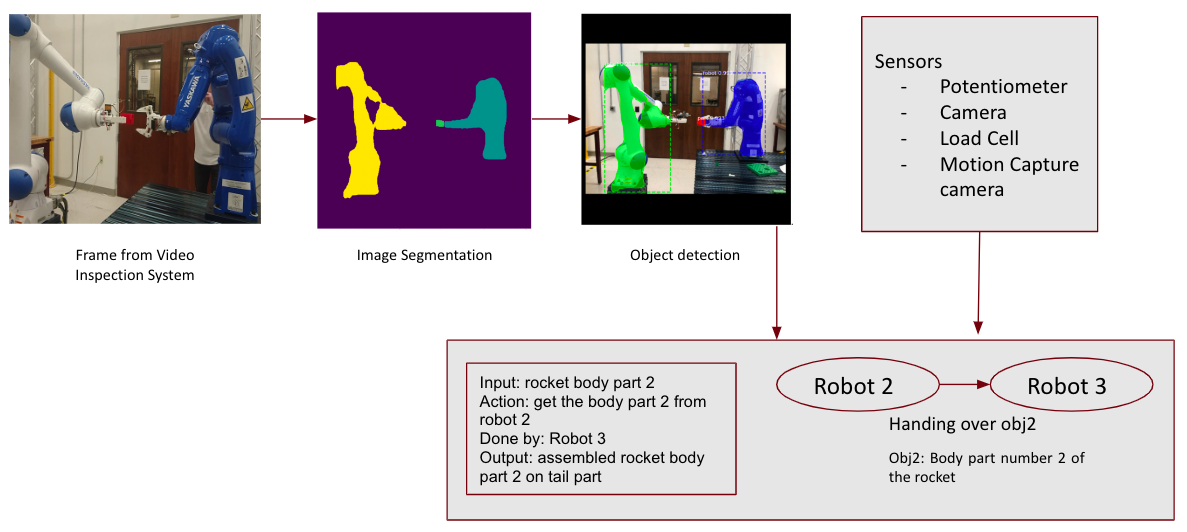
Multimodal Fault Detection and Tolerance Framework for Smart Manufacturing
Collaborators: University of South Carolina, West Virginia University
Advisor: Amit Sheth
Recent technological advancements in Internet of Things (IoT), smart sensors, and robotic systems have greatly influenced the adoption of smart manufacturing techniques. The resulting smart manufacturing plants are equipped with a continuous stream of multimodal data, including sensor data and surveillance footage, which is used to monitor and guide robotic agents to accomplish specific tasks.
One of the key challenges in this area is identifying faults in the manufacturing process.
To address this challenge, we propose to leverage the aforementioned multimodal data sources and employ automated planning techniques to build a fault tolerant smart manufacturing plant.
This research presents a scientific approach to developing a fault tolerant smart manufacturing plant by combining advanced technologies such as IoT, smart sensors, and robotics with automated planning techniques. The use of these techniques enables the analysis and interpretation of the continuous stream of data generated by the manufacturing process, thereby allowing for the detection of faults and the creation of efficient solutions to address them.
The proposed approach has the potential to significantly enhance the efficiency and reliability of smart manufacturing plants, leading to increased productivity and reduced downtime. The outcomes of this research can contribute to the development of more advanced and sophisticated manufacturing processes, bringing us closer to the realization of the Industry 4.0 vision.
Email / LinkedIn / Google Scholar / Github